Portfolio
Here are some of my recent engineering projects that I am allowed to publish:
(If you want to see a bit more about me, look here.)
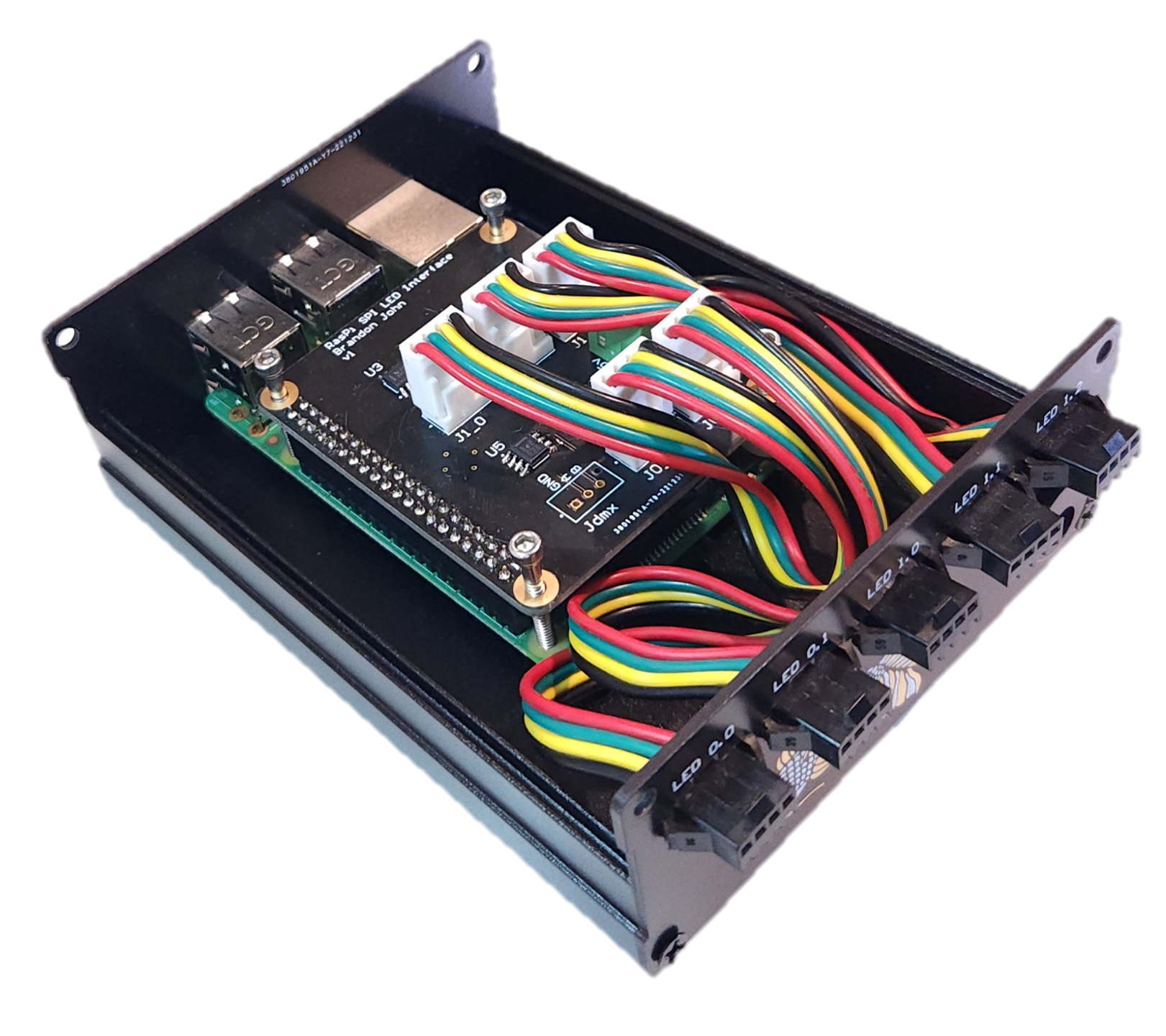
LED Tape Control Interface Github
As a personal project in the Spring of 2023, I created a fully-custom LED tape controller that receives sACN/DMX data and drives up to 5 individual strips of individually-controlled LED pixels. This project included several custom PCBs, a design engine for translating DMX attributes into pixel values, a visualizer, and a custom fixture and set of effects for use on ETC EOS lighting boards.



VCU
One of my larger board designs so far is the VCU for MIT Motorsports (FSAE). I owned the schematic and layout for this family of boards from 2018 to 2020.
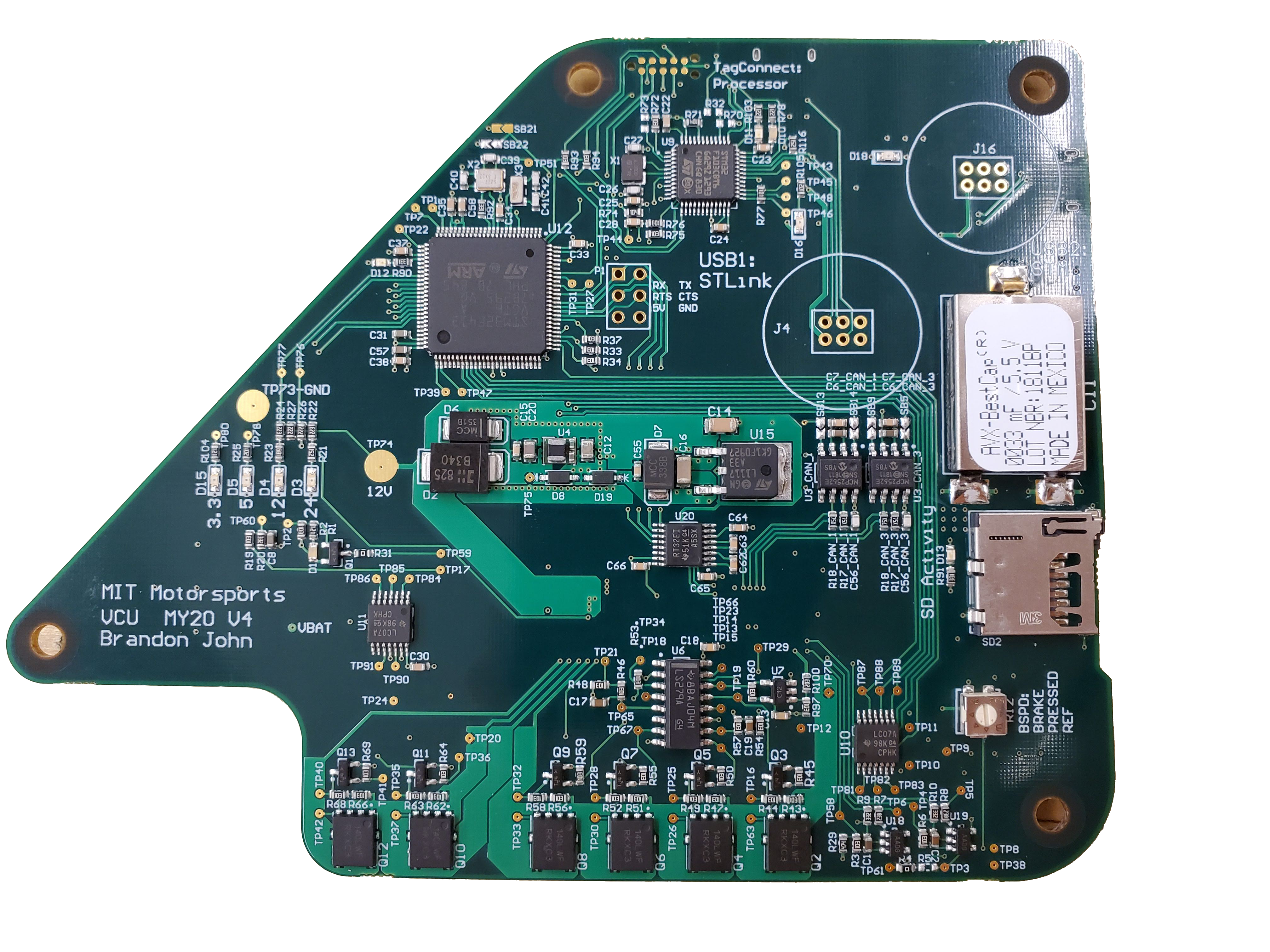
The VCU is used as the main compute module for our electric racecar, with tasks including safety control (a hardware shutdown loop allows any hardware fault on the car to instantly isolate the battery) and data processing, logging, and motor control. It is currently on version 4, involving 2 PCBs, a flex cable between them, and some significant packaging constraints (hence the triangle-ish shape). The VCU replaced/was a continuation of the MegaLV from 2018.
FPGA Minesweeper Github
For my final project for 6.111 (Digital Systems Laboratory) at MIT I implmented Minesweeper on an FPGA using SystemVerilog. Final Report
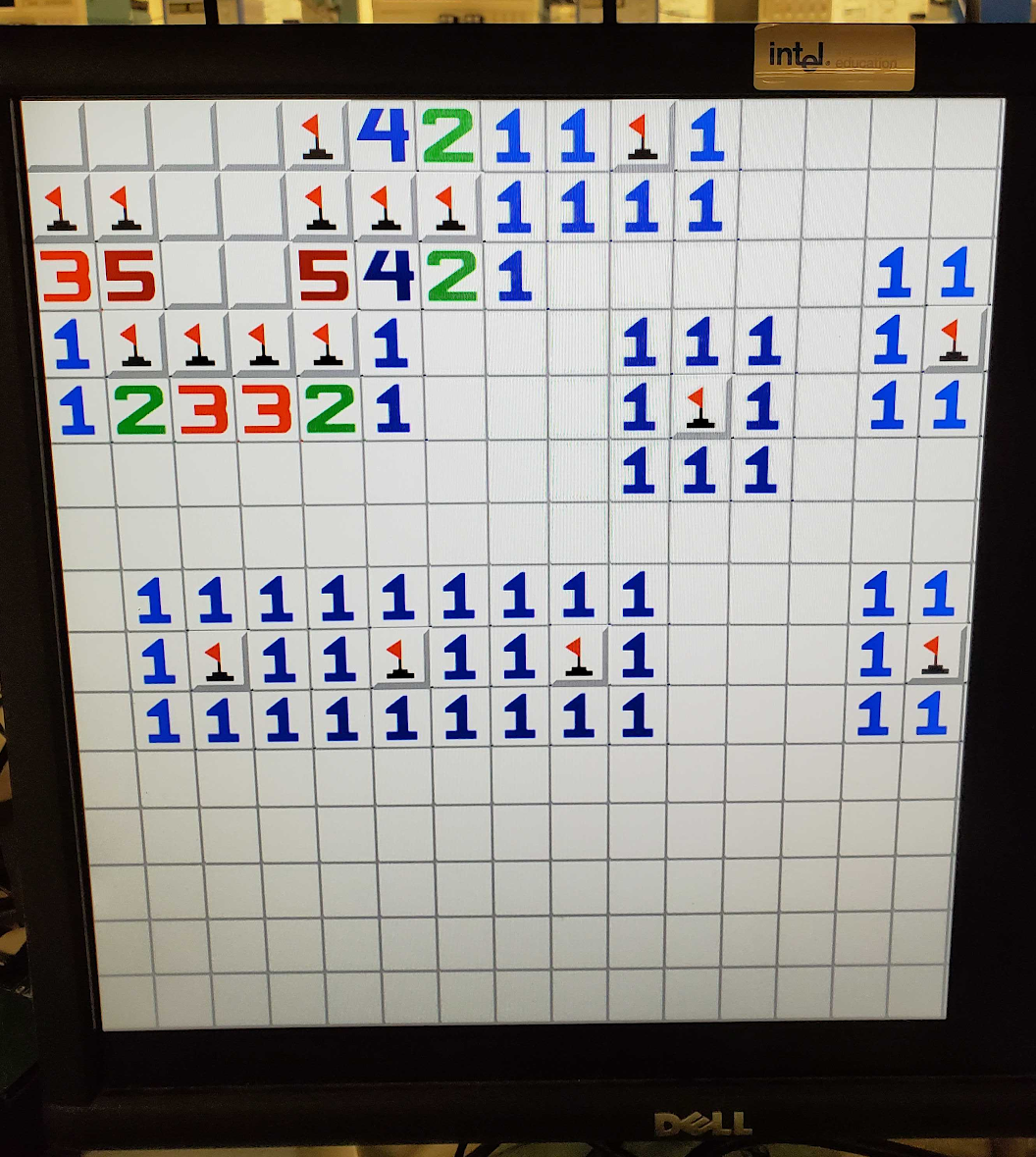
I worked on this project with Rod Bayliss, and together we made a fully functioning Minesweeper on an Artix-7-based Nexys 4 FPGA. Some of the notable features include:
- Minesweeper map generation
- VGA Game rendering
- Audio sound effect playback
- SD card integration
- Custom file system
- USB HID Mouse input
- Random number generator
- Optional themes (falling snowflakes or raindrops drawn over the game, along with soundtrack to match!)
SpinAp Power Distribution Board
I designed this PDB in the spring of 2020 for my UROP with MIT Aero-Astro using Eagle Cad.
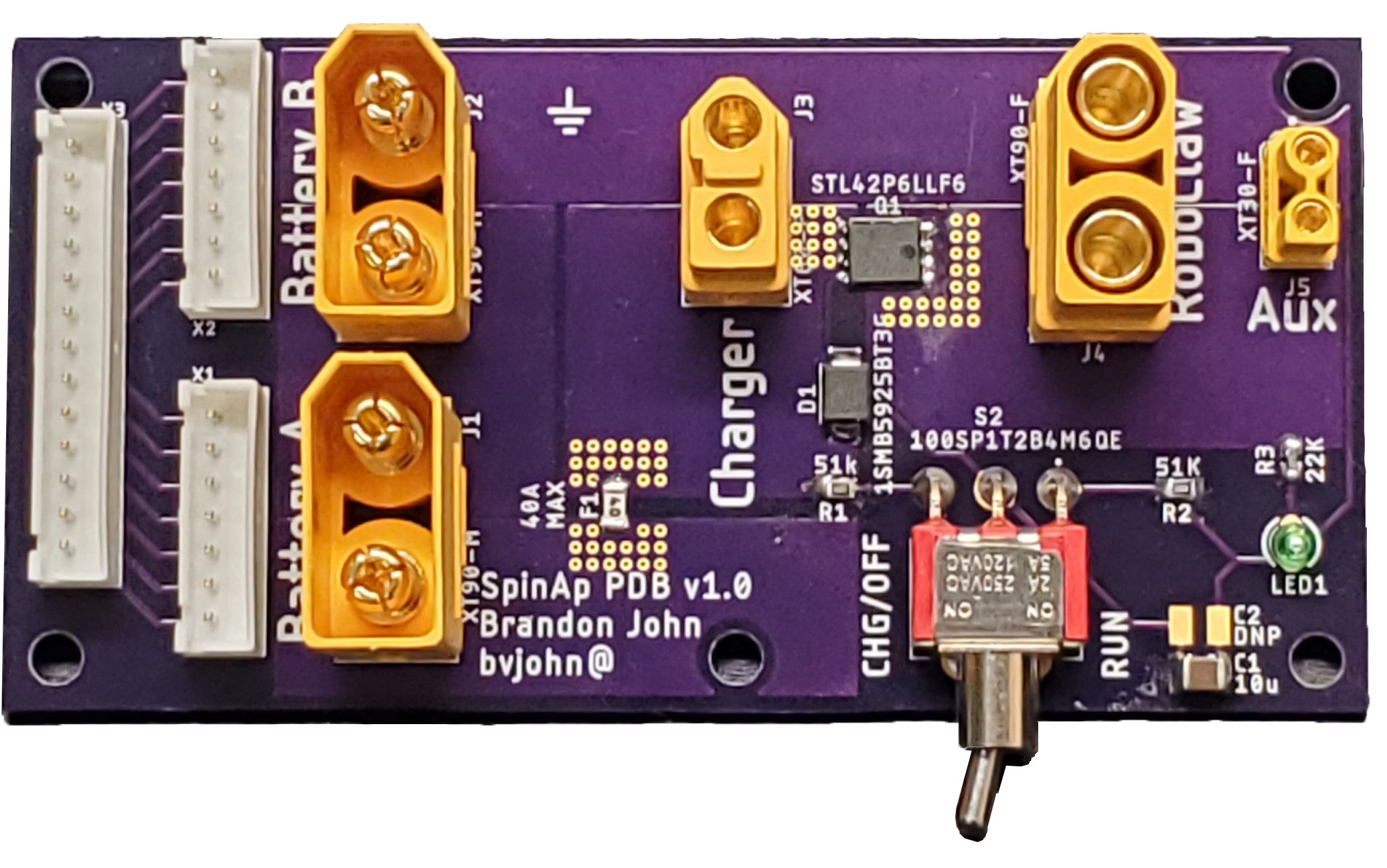
The SpinAp PDB connects 2x 6s LiHV batteries in series to allow for 50V operation of the motor controllers. Each PDB has an integrated soft-start circuit to make connecting and disconnecting the 1mF motor controller bus caps safe, as well as an off/charge mode to allow for charging without having to remove the batteries from the system.
MegaLV
I did the layout of this board in Altium during IAP in 2018 for MIT Motorsports (FSAE)
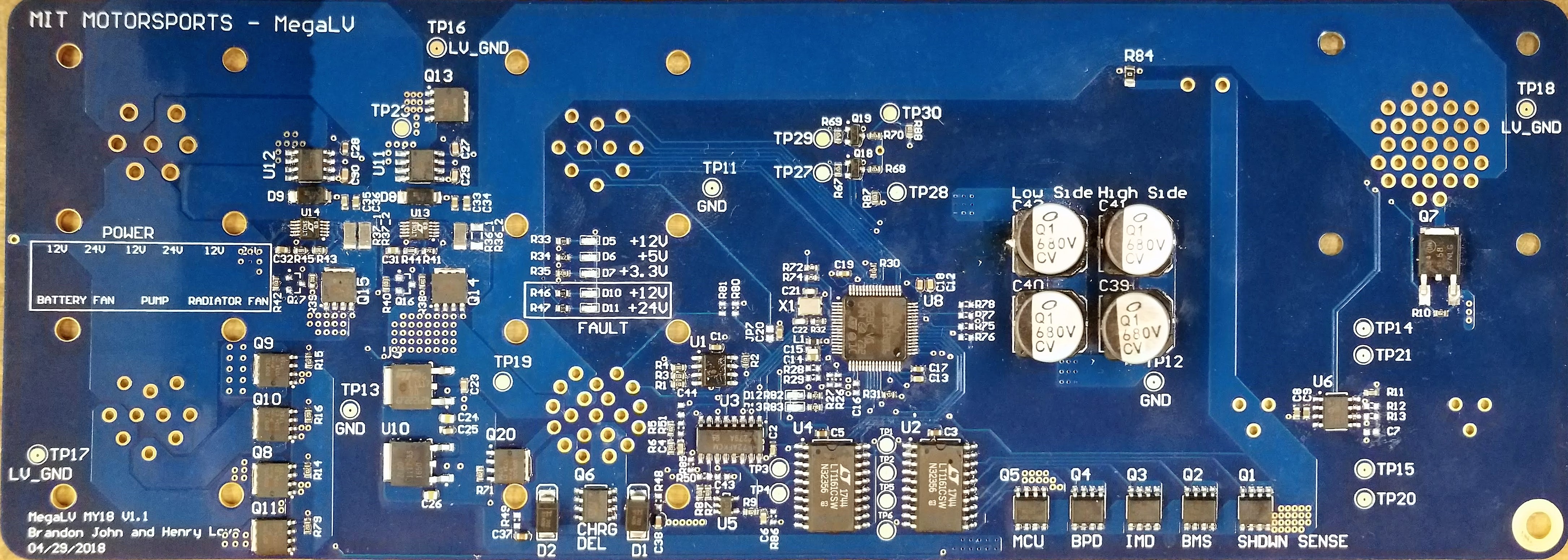
MegaLV was the center of the MY18 LV system. It had 2 main purposes - to control the shutdown loop and immediately shut down the car in case of a fault, and to act as the central master controller, receiving data over CAN and then sending torque commands to the motor controller.
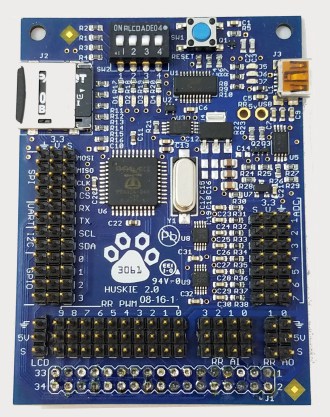
Huskie Board 2.0 Github
I was the main designer of this board in the fall of 2014. I taught a few of my teammates Eagle CAD as we designed this board as a team project. This was made to expand the capabilities of the RoboRIO, which is the board used by FIRST Robotics Competition teams.